网友您好, 请在下方输入框内输入要搜索的题目:
题目内容
(请给出正确答案)
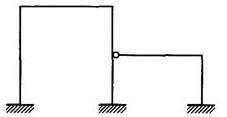
图示结构用位移法计算时,独立的结点线位移和结点角位移数分别( )。
A、2,3
B、1,3
C、3,3
D、2,4
B、1,3
C、3,3
D、2,4
参考答案
参考解析
解析:一般情形下结构有多少个刚结点就有多少个角位移。在组合节点处(铰和支杆相连的节点)也会发生角位移,所以独立的角位移有四个。至于独立的线位移数,则可用机构法判别。机构法是指将原结构的刚结点换成铰结点,固定端换成铰支座,使其变成机构。把最左边和最右边的刚节点处用支杆固定,则整个结构的线位移和支杆的线位移是有关系的,所以独立的线位移有两个。
更多 “图示结构用位移法计算时,独立的结点线位移和结点角位移数分别( )。 A、2,3 B、1,3 C、3,3 D、2,4 ” 相关考题
考题
关于位移法基本未知量,下列叙述正确的有()。A、铰处弯矩为零,故铰处角位移不作为基本未知量(因为非独立量)B、弯曲刚度无穷大杆件两端的转角不需作为基本未知量,当柱子平行且承受水平荷载作用时,结点处不产生转动,即结点转角为零C、静定部分可由平衡条件求出其内力,故该部分结点处的角位移和线位移不需作为基本未知量D、可将原结构改变为铰结体系,用附加链杆方法使该铰结体系成为几何不变体系时,所加链杆数目即为结点线位移未知数目
考题
单选题用力法计算超静定结构时,其基本未知量为()A
杆端弯矩B
结点角位移C
结点线位移D
多余未知力
热门标签
最新试卷
