网友您好, 请在下方输入框内输入要搜索的题目:
题目内容
(请给出正确答案)
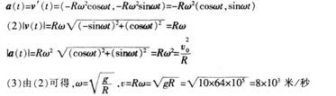
设质点作匀速圆周运动,其轨迹为r (t)=(χ(t),y(t)),其中χ(t)=Rcosωt,y(t)=Rsinωt,速度和加速度分别定义为v(t)=(χ′(t),y′(t)),和a(t)=(χ"(t),y" (t))。
(1)求v(t)和a(t);(4分)

(3)若一飞行器绕地球作匀速圆周运动且只受重力作用(高度可忽略不计),求其飞行速度的大小(设地球半径为6400千米,重力加速度为g=10米/秒2)。(3分)
(1)求v(t)和a(t);(4分)
(3)若一飞行器绕地球作匀速圆周运动且只受重力作用(高度可忽略不计),求其飞行速度的大小(设地球半径为6400千米,重力加速度为g=10米/秒2)。(3分)
参考答案
参考解析
解析:
更多 “设质点作匀速圆周运动,其轨迹为r (t)=(χ(t),y(t)),其中χ(t)=Rcosωt,y(t)=Rsinωt,速度和加速度分别定义为v(t)=(χ′(t),y′(t)),和a(t)=(χ"(t),y" (t))。 (1)求v(t)和a(t);(4分) (3)若一飞行器绕地球作匀速圆周运动且只受重力作用(高度可忽略不计),求其飞行速度的大小(设地球半径为6400千米,重力加速度为g=10米/秒2)。(3分)” 相关考题
考题
下列说法不正确的是________。
;A.两个周期信号x(t),y(t)的和x(t)+y(t)一定是周期信号B.两个周期信号x(t),y(t)的周期分别为2和根号2,则其和信号x(t)+y(t)是周期信号C.两个周期信号x(t),y(t)的周期分别为2和pi,其和信号x(t)+y(t)是周期信号D.两个周期信号x(t),y(t)的周期分别为2和3,其和信号x(t)+y(t)是周期信号。
考题
有一线性系统,其输入分别为u1(t)和u2(t)时,输出分别为y1(t)和y2(t)。当输入为a1u1(t)+a2u2(t)时(a1,a2为常数),输出应为()。A.a1y1(t)+y2(t)B.a1y1(t)+a2y2(t)C.a1y1(t)-a2y2(t)D.y1(t)+a2y2(t)
考题
一个测试系统不管其复杂与否,都可以归结为研究输入量x(t)、系统的传输特性h(t)和输出量y(t)三者之间的关系()。A、y(t)=h(t)*x(t)B、y(t)=h(t)x(t)C、y(t)=h(t)/x(t)D、h(t)=y(t)*x(t)
考题
下列程序将x,y和z按从小到大的顺序排列,请将下面的函数模板补充完整。 template void fu
下列程序将x,y和z按从小到大的顺序排列,请将下面的函数模板补充完整。 template<class T> void fun(______) { T a; if(x>y) { a=x; x=y;y=a; } if(y>z) { a=y; y=z;z=a; } if(x>y) { a=x; x=y;y=a; } }A.T x,T y,T zB.T x;y;zC.T x,T y,T ZD.T x,y,z
考题
下面程序的输出结果是()。includeusing namespace std;templateT max(T x,T
下面程序的输出结果是( )。 #include<iostream> using namespace std; template<class T> T max(T x,T y) { return(x>= y ? x:y);} template<class T> T max(T x,T y,T z) { T t; t=(x>=y ? x:y); return(t>=z ? t:z); } void main(){ int x = 10,y=18,maxi; float a = 1.2,b = 3.2,c = 2,max2; max1 = max(x,(int)c); max2 = max(a,b,(float)y); cout<<maxi<<endl; cout<<max2<<endl;A.18 3.2B.10 18C.10 3.2D.编译出错
考题
一平面简谐波沿X轴正向传播,已知x=L(L<λ)处质点的振动方程为y=Acosωt,波速为u,那么x=0处质点的振动方程为( )。A.y=Acosω(t+L/u)
B.y=Acosω(t-L/u)
C.y=Acos(ωt+L/u)
D.y=Acos(ωt-L/u)
考题
一振幅为A、周期为T、波长为λ平面简谐波沿x负向传播,在x=λ/2处,t=T/4时振动相位为π,则此平面简谐波的波动方程为:
A. y = Acos(2πt/T-2πx/λ-π/2)
E. y = Acos(2πt/T+2πx/λ+π/2)
C. y = Acos(2πt/T+2πx/λ-π/2)
D. y = Acos(2πt/T-2πx/λ+π/2)
考题
A.y=Acos[2πv(t+to)+π/2]
B.y=Acos[2πv(t-to)+π/2]
C.y=Acos[2πv(t-to)-π/2]
D.y=Acos[2πv(t+to)-π/2]
考题
一平面简谐波沿X轴正向传播,已知x=L(Lλ)处质点的振动方程为y=Acos(∞t+φ0),波速为u,那么x=0处质点的振动方程为:()A、y=Acos[ω(t+L/u)+φ0]B、y=Acos[ω(t-L/u)+φ0]C、y=Acos[ωt+L/u+φ0]D、y=Acos[ωt-L/u+φ0]
考题
一振幅为A、周期为T、波长为λ平面简谐波沿X负向传播,在X=(1/2)λ处,t=T/4时振动相位为π,则此平面简谐波的波动方程为:()A、y=Acos(2πt/T-2πx/λ-1/2π)B、y=Acos(2πt/T+2πx/λ+1/2π)C、y=Acos(2πt/T+2πx/λ-1/2π)D、y=Acos(2πt/T-2πx/λ+1/2π)
考题
一平面简谐波沿x轴正向传播,已知x=L(Lλ)处质点的振动方程为y=Acosωt,波速为u,则波动方程为()A、y=Acosω[t-(x-L)/u]B、y=Acosω[t-(x+L)/u]C、y=Acosω[t+(x+L)/u]D、y=Acosω[t+(x-L)/u]
考题
信号x(t)和y(t)的互谱Rxy(f)是()。A、x(t)与y(t)的卷积的傅氏变换B、x(t)和y(t)的傅氏变换的乘积C、x(t)•y(t)的傅氏变换D、互相关函数Rxy(t)的傅氏变换
考题
给定两个连续时间信号x(t)和h(t), 而x(t)与h(t)的卷积表示为y(t),则信号x(t+1)与h(t-2)的卷积为()A、y(t)B、y(t-1)C、y(t-2)D、y(t+1)
考题
一平面简谐波沿X轴正向传播,已知x=L(Lλ)处质点的振动方程为y=Acosωt,波速为u,那么x=0处质点的振动方程为()。A、y=Acosω(t+L/u)B、y=Acosω(t-L/u)C、y=Acos(ωt+L/u)D、y=Acos(ωt-L/u)
考题
下列说法正确的是():A、两个周期信号x(t),y(t)的和x(t)+y(t)一定是周期信号B、两个周期信号x(t),y(t)的周期分别为2和,则其和信号x(t)+y(t)是周期信号C、两个周期信号x(t),y(t)的周期分别为2和,其和信号x(t)+y(t)是周期信号D、两个周期信号x(t),y(t)的周期分别为2和3,其和信号x(t)+y(t)是周期信号
考题
单选题反馈控制系统的过渡过程时间为tS,被控量的最终稳态值为y(∞),则tS是当t≥tS时满足()。A
|y(t)-y(∞)|=0B
|y(t)-y(∞)|≥2%y(∞)C
|y(t)-y(∞)|≤2%y(∞)D
|y(t)-y(∞)|≤0.2%y(∞)
考题
单选题设流场的表达式为:ux=-x+t,uy=y+t,uz=0。求t=2时,通过空间点(1,1,1)的迹线为( )。[2019年真题]A
x=t-1,y=4et-2-t+1,z=1B
x=t+1,y=4et-2-t-1,z=1C
x=t-1,y=4et-2-t-1,z=1D
x=t+1,y=4et-2+t+1,z=1
考题
单选题平面简谐波沿x轴正方向传播,其振幅为A,频率为v,设t=t 0时刻的波形如图所示,则x=0处质点的振动方程是()。A
y=Acos[2πv(t+t 0)+π/2]B
y=Acos[2πv(t-t 0)+π/2]C
y=Acos[2πv(t-t 0)-π/2]D
y=Acos[2πv(t-t 0)+π]
热门标签
最新试卷
